Definition of a handheld GPS unit
A handheld GPS (Global Position System) unit can be defined as a portable apparatus/device which is meant to determine the exact location of a person, vehicle or anything else that is attached to it by the use of Global Positioning system technology (Huang, 1999). The GPS unit records the information about the location of what it is tracking regularly. The location data is stored in the tracking unit, it can also be transmitted into a data base that is centrally located and can also be stored in a computer that is connected with internet. Storing the location data helps in displaying the location of what is being tracked on a map
Methodology
A Hugglands GPS Garmin receiver is an example of such a device used to track vehicles in East Antartica (Huang, 1999). It was calibrated when tracking a vehicle which had a small navigation quality, connected to Garmin 128, 12 channel single frequencies and a unit that was mounted into the vehicle. Calibration was performed on the lower slope of Law Dome, some 20km from Casey. This unit was collected the following day after collecting navigation data for 16 hours. Six stations were established in a regular hexagon on the circumference of a circle that had convectional field cane makers and occupied these stations with the Hagglunds on eight occasions.
Three occupations used a clockwise traverse while the second three occupations used an anticlockwise traverse. For the final two occupations, one used clockwise while the other used anti-clockwise traverse which occurred 2 hours after the first six occupations (Huang, 1999). According to Newham (2005) “this pattern was chosen to reduce the impact of the vehicle induced-multipath and the vehicle location errors relative to the marker”. This reduced data is shown in the figure below. The static Leica 500 GPS data totaling to six hours were reduced in a global network using a double difference equation. Data from the six stations and 20 other stations made sure that this single static station had a precision greater than 0.1m.
The device took one minute to drive the chord between the stations. This type of oscillation is not good because it affects the periodicity of data (Newham, 2005). This kind of oscillation can also not be traced because it was intense even though it used a high number of satellites. This implies that the number of satellites and their position in the sky affects oscillation (Newham, 2005).
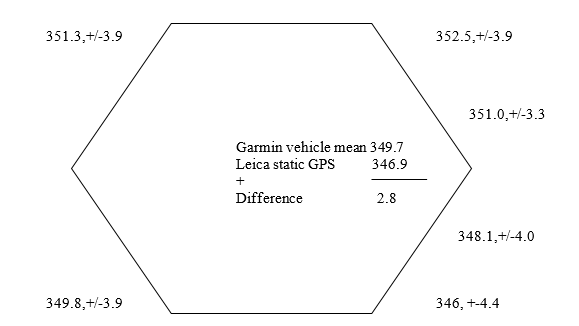
The stated precision was one sigma of a single observation. Newham (2005) stated that “the precision of the mean value at the centre of the hexagon estimated from the means of the six hexagons stake values was1.3m above pooling”. The global 1-sigma precision of a single observation which was compared from the residuals was 3.6m.
The table below indicates a sample of the means and standard deviations of estimated mean when using three different types of Hugglands GPS Garmin receivers at calibration sites A and B (Newham, 2005).
This calibration method was effective because the bias between the average mean sea level and the orthormetric heights were easy to determine (Newham, 2005). Another major reason for the effectiveness of this method was that the software algorithms and XL units used could be easily accounted for. Newham (2005) argued that “the placing of the three Garmin receivers close to the bench marks on the surface of a rock made it easy to stimulate the gravity”. The replications were done three different times using configurations of the satellites and the standard deviations did not have effects on the device implying that the unit weights could be used in future assessment and still yield positive results (Parkinson et al, 1996).
However, when one decides to use two receivers, most of the errors can be minimized. When using different navigations, the range of the mean and standard deviation can be computed by correcting the ranges based on where one of the receivers is positioned. The accuracy of the positions in this case increases to 1-10 meters instead of 10-100m which is the accuracy when using standalone receiver. This method can be applied in Australia because the area around Law Dome was well executed and conceived when the GPS results were being taken; during the 2004/05 season (Kaplan & Hegarty, 2000).
Background of the handheld tracking device
The Hugglands GPS Garmin receiver was used for the assessment of the gravity signature of the Windmill Islands in East Antarctica (Newham, 2005). It was used collect global positioning system information during the 2004/2005 season over Law Dome and its environs. It was expected and subsequently validated by calibration and inter-comparison experiments that a single navigation receiver would provide horizontal positions to the order of 2 meters and vertical heights close to 3 meters. Chances of increased reliability, validation and checking were easily attained by operating two or more units independently if valid procedures were executed (Parkinson et al, 1996).
During the design stage of this project; several global positioning system methodologies were examined in order to make decision on which was the most effective (Newham, 2005). The first method was the use of 1.1 only pseudo data which was collected by the use of hand held GPS vehicle tracking unit. This method was good because it was simple to install and operate the tracking device in all vehicles. This method was preferred because it would provide reliable data and all the field team members would be able to use it. The other option was to use geodetic quality carrier phase data and pseudo range data on both the L1 and L2 frequencies.
This method required special skills for mounting the vehicle electronic connections. There was also the need to use a ruggedised computer resulting to more complications in mounting the device. Newham (2005) argued that “the other demerit with this method was that there was additional cost due to power requirements”. This method could provide quality data even though its demands were too high (Newham, 2005).
Conclusion
There is need to improve the navigation unit and invent a navigation unit that combines all the navigation instruments into a perfect single instrument that can display all the navigation information individually. The handheld navigation unit should be portable and should have a processor that is internal. The major component of modern GPS unit that include a display, a magnetic sensor, a GPS receiver, a memory and a tilt-sensor should be connected to the processor that later connects to GPS-dispatch antenna. All these components and a power supply should be housed and be inserted into a portable plastic housing.
References
Huang, J., (1999). All About GPS: Sherlock Holmes’ Guide to the Global Positioning System. New York: International Universities Press.
Kaplan, E.D. & Hegarty, W., (2000). Understanding GPS: Principles and Applications, Second Edition. New York: oxford university press.
Newham, A., (2005). Generating Custom Garmin GPS Maps. New York: Oxford University Press.
Parkinson B. W. et al, (1996). Global Positioning System: Theory and Applications.New York: Routledge.