Robosub is incredible international competition for mainly student teams seeking to demonstrate their technical success in developing fully autonomous submersibles that showcase the skills of modern devices. It should be recognized that the unique feature of the competition entirely affects the final design, which should have an unmanned device: according to the regulations, the device must overcome the obstacle course with a thematic focus related to vampires (“RoboSub,” n.d.; Robonation Robotics Community, 2019). The basic requirements for a designed device are lightness, maneuverability, and the ability to analyze path assessment space intelligently (fig. 1). A good strategy in modeling AUV will be considered as the removal of unnecessary elements of the frame, facilitation of communication modules, including Wi-Fi, GPS, and 4G, the use of plastic materials instead of steel. Typically, the main electronics are located under the end cover of the device, but the bottom of the reservoir’s increased pressure can cause pressure drops, resulting in water breaking the waterproofing and leaks to the batteries and processor. Consequently, AUV must have sufficient tightness to maintain its performance: this can be achieved by first lubricating the frame joints with insulating materials. In combination with waterproofing, AUV must be able to see underwater barriers and transmit images to a remote computer. Since some underwater cameras are quite heavy, developers should pay attention to lightweight GoPro or Microsoft Lifecams. It is interesting to note that there should be several cameras (stereo effect), and the optimal location is considered radial when each camera has a specific viewing angle. A successful solution is to place them under the frame, as the camera can get wet, which will lead to disruption of AUV. In this case, the frame should be transparent and made of, for instance, acrylates or carbonates.
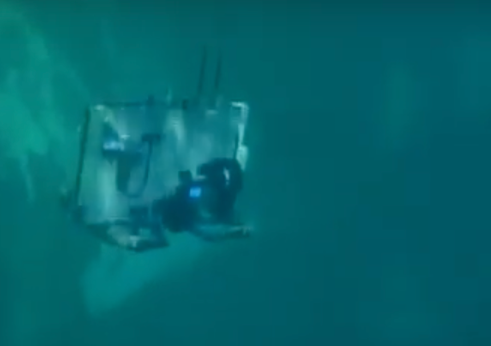

Having analyzed the work of past years, special attention should be paid to the apparatus of the winners of 2019, from the University of Harbin. Assembled by Chinese students, AUV has the form of a parallelepiped, while inside the box are the main electronic components of the drone (RoboNation, 2019). The elegant solution is not to make the parallelepiped closed: as can be seen in figure 2, water can penetrate freely but does not get on the waterproofed parts. Moreover, probably, a substantial advantage of the team was the change of software for AUV: Jetson Tx2 was replaced by Jetson Xavier (Wenzhi et al., 2019). The most intriguing question that arises when viewing this design is the definition of the center of gravity. Because of the space analyzer with the gripper facing forward, the AUV must have an offset balance, but the location of the central and most massive components closer to the right edge seems to solve this problem.

It is worth saying that the competition regulations do not set specific figures for the release or capture of objects, including the time or force of the “claws,” but it is clear from the text that the drone must have sufficient qualifications to withdraw, move and release objects quickly. One of the competition tasks was to check how AUV will open the closed coffer by lifting its lid. The apparatus must grab the box’s protruding handle and turn it to the vertical position, after which the coffin lid will open automatically. Once this action is performed, AUV must grab Dracula inside the coffin and take him to the contest area to get points.
References
RoboNation. (2019). 2019 RoboSub | Harbin Engineering University [Video]. YouTube. Web.
Robonation Robotics Community. (2019). Mission and scoring [PDF document]. Web.
RoboSub. What is RoboSub? (n.d.). Robonation. 2020, Web.
Wenzhi, L., Haibo, L., Xiufen, L., Hanwen, Z, Hong, L., Jun, H., Ming, H., Jinxiao, Z., Zhiyu, L. (2019). Autonomous Underwater Vehicles for the 2019 RoboSub Competition [PDF document]. Web.