Executive Summary
This report focuses on functional development, systems synthesis, and design options for the capability baseline of the proposed Air-Deployable Amphibious Vehicle (ADAV) system. The system is designed to integrate air-deployability functions into amphibious vehicles, thereby enabling faster, more flexible handling of diverse scenarios and user requirements.
First, the report delineates high-level functions, including deployment, land and water mobility, cargo and personnel transport, communications, and sensor integration. Then, these high-level functions are decomposed using appropriate modelling tools into lower-level functions, thus enabling deeper analysis and system design. The system synthesis section identifies suitable subsystems, such as propulsion, communication modules, and sensor payloads. Two design options, the modular amphibious configuration and the integrated amphibious platform, will then be compared based on the Pugh matrix and the best option recommended.
Introduction
In the pursuit of boosting security and rescue operations in the vast Australian continent, the ADAV emerges as a strategic solution. An amphibious vehicle is capable of operating on both land and water, and in Australia, it must be delivered by air (Goldsworthy, 2019). Australia’s vast, unoccupied land, long coastlines, and rugged terrain, with many lakes and rivers, make the implementation of the system imperative.
The ADAV system will operate by deploying the vehicles into a special aircraft, the C-17 Globemaster III, and dropping them into the desired location near a coastline using parachutes. The vehicles will use rubber wheels on land for maximum speed, despite their potential to punch. The two option designs analyzed in this study will be the modulator amphibious configuration and the integrated amphibious platform. The latter will be selected because it offers greater versatility, can be easily integrated, and provides better resource utilization.
System Overview and System Requirements
How the ADAV Will Operate
The ADAV is a multifunctional system that improves on previous amphibious vehicles by being air-deployable and featuring design changes that enable seamless operation across land and sea. The system is equipped with the latest technologies for defense and rescue operations. Various stakeholders, such as defense forces, law enforcement organizations, and rescue teams, have widely accepted it.
One of the key features of this system is amphibious capability, which is the ability of a vehicle to operate on both land and sea, which makes it necessary for them to have hovercraft capabilities to facilitate transitioning(Manoharan et al., 2021). ADAV is designed for air deployment, making it easy to launch from remote locations and thus an effective solution in a continent with a vast landscape such as Australia. These abilities to be deployed by air also make the system easy to use for international collaborative missions, as the vehicles can be sent overseas. Another critical feature of this system will be manoeuvrability, which aims to optimize the performance of the cars in land and sea operations, thereby facilitating more effortless movement for defense, surveillance, and response teams. The ADAV system integrates advanced technologies outlined in the first proposal, ensuring strong coordination among functions and enabling comprehensive operational capability.
Uses of the System
This system is designed to support multifunctional roles, ranging from helping Australian defense organizations keep the country secure to assisting in emergencies such as rescue operations and international collaborative missions. The ADAV system’s adaptability makes it easily tailored to perform the three roles mentioned above.
Australia has a large border, 100% of which is a sea line (Konlechner et al., 2020). The ability of the vehicles to have sensors and other modern technologies to monitor and survey the borders will not only ensure the safety of the country’s citizens but also reduce the workload and the cost of doing this surveillance.
System Capabilities and Measures
For this system to be considered a success, it must meet specific capabilities, as measured by various indicators. The ADAV will be capable of operating on land and in water, and before its deployment, rigorous testing will be conducted to ensure it can operate on both terrains. The ADAV is to be deployed by air, and to meet this criterion, the vehicle must be light enough and designed with specific dimensions that ensure it can fit in the aircraft (Rafeeq et al., 2021).
The amphibious vehicle must also meet manoeuvrability and integration standards. This aspect will be assessed by conducting controlled tests and simulations on land and at sea to determine whether the vehicles meet the expected operational standards. For instance, in land operations, the vehicles should be able to reach 100 km/h, and at sea, 52 knots.
Functional Decomposition
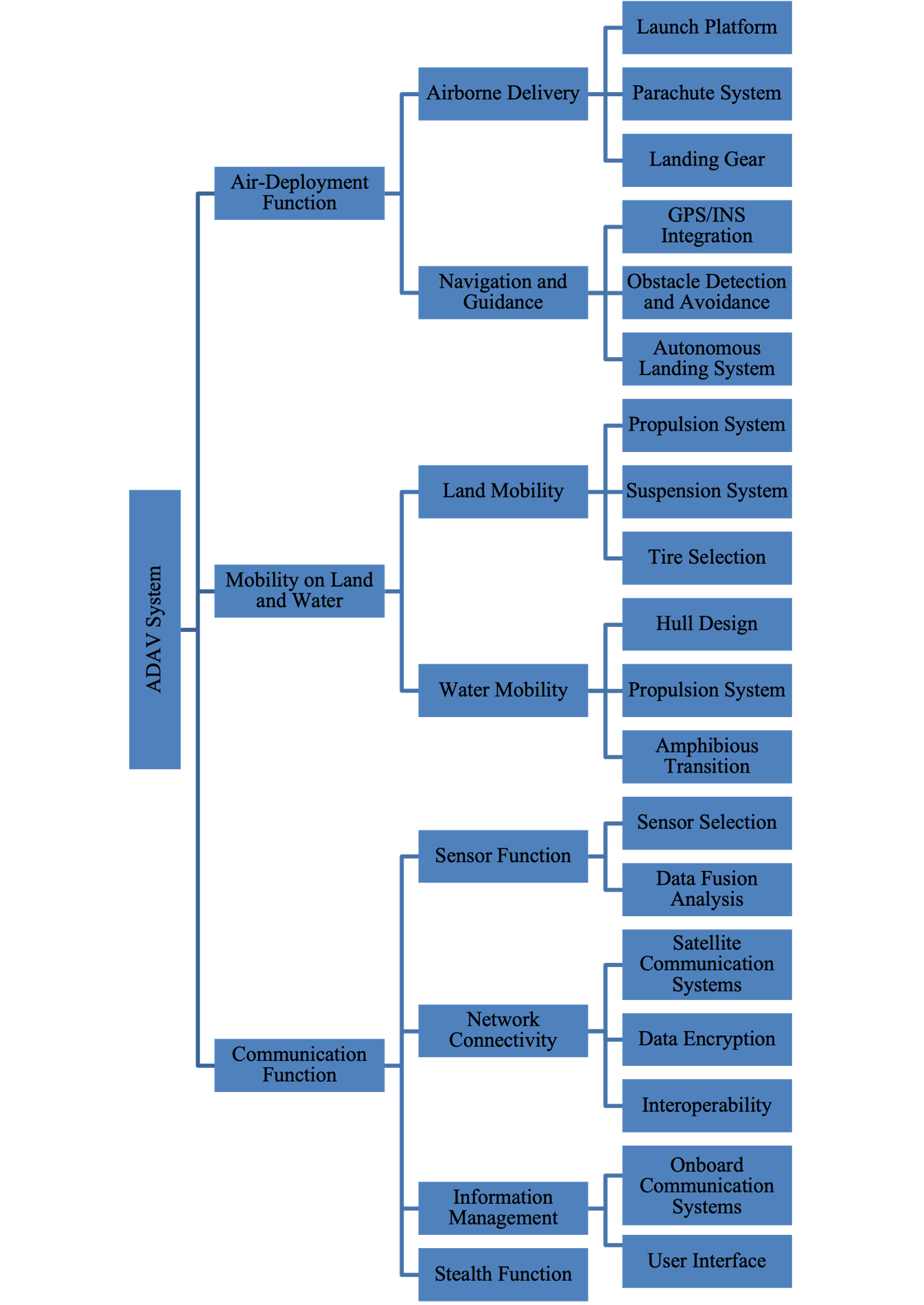
High-Level Functions
Air Deployment Function
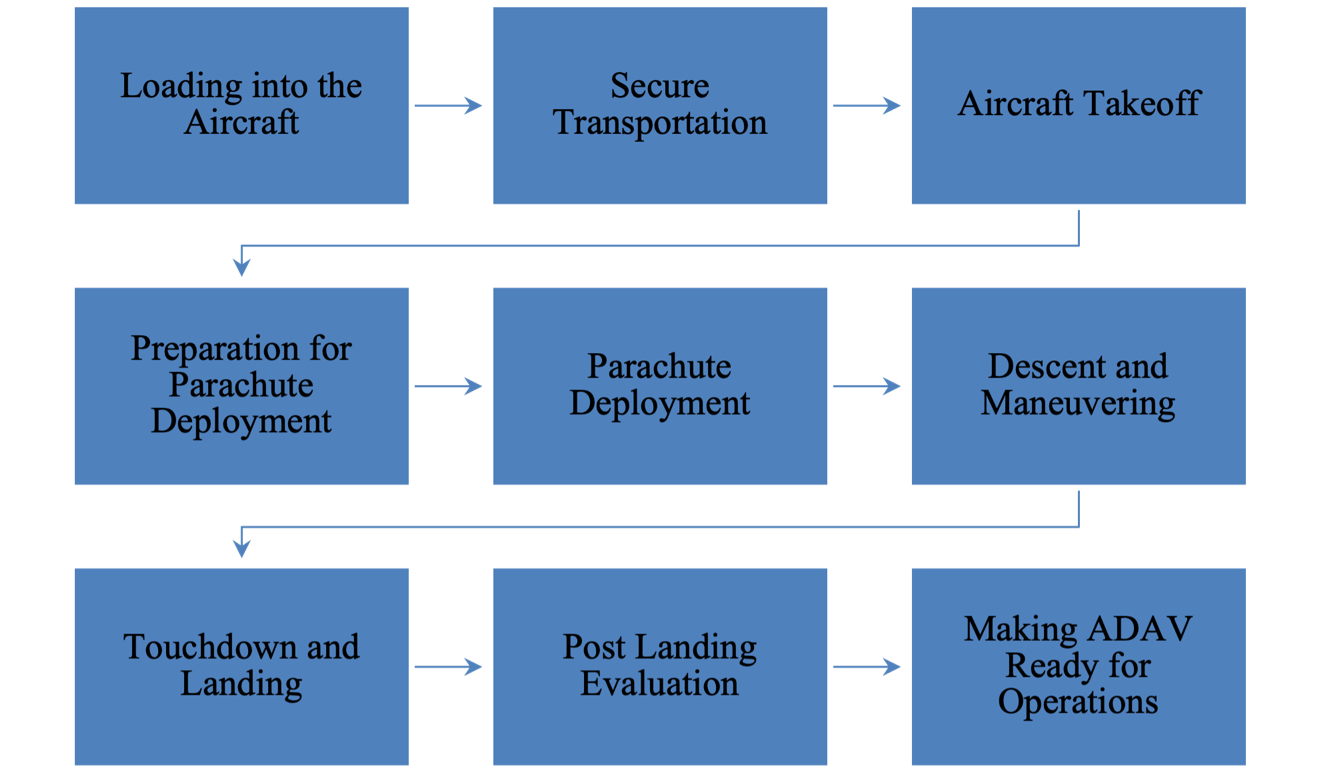
Before loading the ADAV into the selected aircraft, various tests will be conducted. These will include measuring the vehicle’s weight to ensure it can be carried by the aircraft, assessing its shape to ensure it fits, and considering its weight and dimensions. The vehicle’s design will be customizable, with the aircraft’s wings foldable, the antennas retractable, and the appendages adaptable. These design customizations will ensure that the vehicle’s overall dimensions fit easily into the airplane.
The system shall also include a loading ramp to ensure the plane can easily accommodate the vehicle. To reduce the risk of damage to both the car and the aircraft, the system should include a loading and winching mechanism to strategically place the cargo (Villa, Brandão, and Sarcinelli-Filho, 2019). Straps will be used to ensure the vehicle is fitted adequately during loading, and harnesses will ensure weight is distributed correctly within the aircraft.
To facilitate the secure transportation of the amphibious vehicle, it will be fitted with advanced shock-absorbing mechanisms to prevent damage during the shocks it will encounter during deployment. Suspension systems and damping materials buffer against these turbulences during transportation (Abdulwasea et al., 2022). Moreover, damage shall be minimized by ensuring the planes are as smooth as possible.
The aircraft for these systems will be integrated with navigation systems and autopilot features, ensuring the airplane remains stable during takeoff and landing. Autopilot systems are critical for smoother flights, as they reduce human errors that can cause unexpected maneuvers and damage vehicles during transit. Moreover, before transporting cars, the weather will be thoroughly studied, and adverse conditions will be avoided.
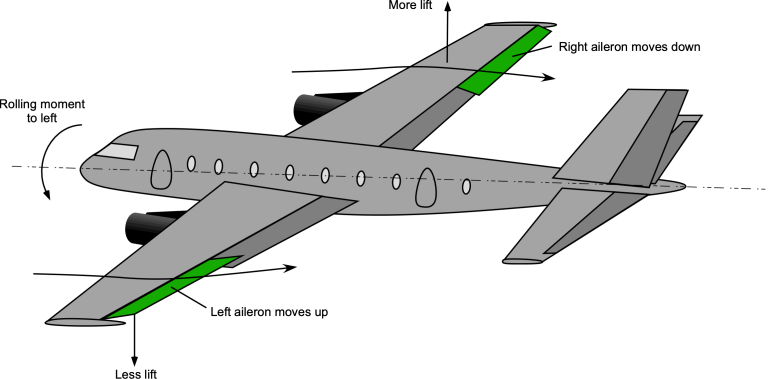
In the take-off phase, the aircraft’s acceleration will be gradual, and the pilot must be well-trained and experienced to ensure smooth take-offs without sudden launches. The ascension angle must be set to less than 57.6 degrees, as steep slopes in this phase may adversely affect the vehicle (Labonté, 2020). This aircraft’s control systems will be designed to provide controlled pitch and roll movements, preventing sudden jerks and tilts that could detach or destroy the vehicle’s internal components. Moreover, when designing the vehicle, its focus will be on ensuring it remains durable during the take-off phase. The aircraft used to transport the amphibious vehicle is shown in picture 1 below.
Before initiating the parachute deployment phase, the team must ensure the amphibious vehicle is in the expected location in the aircraft, the parachute is tested to verify its integrity, and other related safety measures are in place. This approach will include physically inspecting the parachute for signs of wear and tear. GPS calibrations can help teams determine whether the aircraft’s height is correct for the deployment (de Boer et al., 2022).
Moreover, additional protective measures will be implemented for amphibious vehicles carrying other payloads to ensure the parachute remains intact. The people on the ground must be adequately informed about the deployment procedure to ensure effective communication. Secondary parachutes will provide backups in case the initial parachute is found to have redundancies. The landing position will also need to be examined in real time to ensure it is not missed.
Mobility of Land and in Water
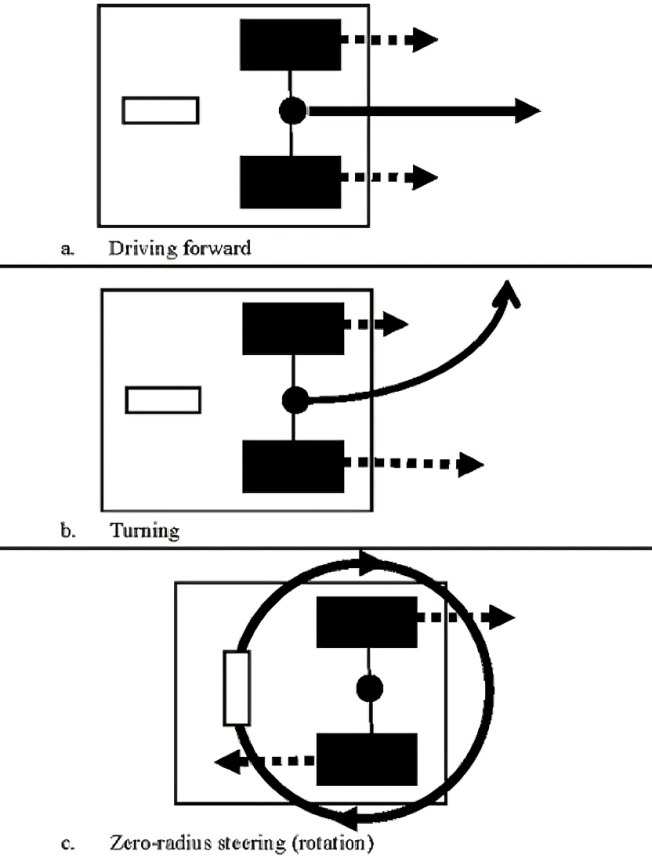
The ADAV will be equipped with a dual steering system capable of meeting the vehicle’s needs on both land and in water. A zero-radius steering capability will be used, as it can reduce the automobile’s dead weight and simplify the design of the controls, as shown in illustration 2. The system wheel shall be designed using traditional land navigation tools, such as joysticks, and water-control tools, such as rudders and other propulsion components.
The design will have a front-wheel-drive system, which will be activated when the vehicle is operating on land, and a rear steering system that shall be used only when the car is working on or in water. There will be no four-wheel-drive systems, as they have previously proved redundant in these vehicles (Rafeeq et al., 2021). The steering needs to be lightweight and attachable to the car, ensuring it can be easily carried by the aircraft and that buoyancy is maintained.
The vehicles will be fitted with adaptive suspension systems to optimize ground clearance, reduce the risk of shocks, ensure traction, and facilitate smooth, even movement. In the past, engineers have sought to maximize vehicle performance, whether on land or in water (Jasiński, Meredith, and Kirwan, 2021). However, the performance will be evaluated in both modes of the proposed amphibious vehicle. This shall be achieved by having the cars use a single-wheel controller to provide direction.
The engine and power management aspects of the proposed amphibious vehicle will play a critical role in ensuring its effectiveness, speed, and reliability in both land and water environments. The system will utilize hybrid engines, with the land one connected to electronic motors, thus offering torque and regenerative braking essential for navigation. Since the Australian terrain is rugged, the engine used for land movement shall be integrated with hydraulic drives, providing the vehicle with extra power and control. Water jets and propellers powered by electric motors provide good maneuverability, with the jets functional for slow movement (Ferraro et al., 2023). Fitting the control function with primary, electric controls, and adaptive technologies will enable the ADAV to perform its roles in defense and rescue operations.
Communication Function
The communication function in the proposed ADAV system will comprise network connectivity, stealth low-level function, and information management. The stealth will be designed to avoid detection of amphibious vehicles during sensitive military operations, including during deployment. Radar-absorbing materials will be used to manufacture the amphibious vehicle and the airplane used to build it, thereby reducing their radar cross-sections. These materials include ferrite, form absorbers, and conductive polymers, which can be easily and cheaply procured in Australia (Lan et al., 2021). The compounds are usually electromagnetic, making it difficult for enemy waves to reflect signals when they hit the airplane or vehicle. This issue will make the system less detectable by the enemy’s radar systems.
The radar-absorbing materials used will need to be durable and resistant, thus capable of operating in the harsh Australian environment. Therefore, they will have to be combined with other elements to make them resistant to UV radiation and extreme weather conditions, thus making the plane more flexible. The materials used to ensure the durability of the amphibious vehicles’ building blocks will also be thoroughly studied.
The colors used in designing the system shall also blend with the surrounding environment, making it difficult for the enemy surveillance team to detect the vehicles. Radar-absorbing materials will also be used to coat other parts of the vehicle, ensuring they don’t act as bottlenecks and enabling the system to be fully anti-radar detectable. Tests will be conducted once all measures to minimize radar detection have been taken.
In addition to radar, other techniques will be used to ensure the system is as undetectable as possible. Jamming has proved effective for counteracting radar systems and enemy communication networks, thereby reducing their overall detection capabilities (Sharma, Sarma, and Mastorakis, 2020). The system shall be equipped with a radar warning receiver that sends a signal to the team when radar waves are detected. Once this is noticed, the vehicles will automatically activate radar anti-detection measures to prevent signals from being sent back to the enemy. Additionally, to confuse the enemy, even more false frequencies will be transmitted that falsely claim the enemy’s exact location. Therefore, their surveillance team will have difficulty distinguishing which waves are from the amphibious vehicle and which are false.
Thermal camouflage strategies that reduce the infrared radiation from the ADAV will be used to make the system components less detectable. This method will involve coating the surface with rubber-metal black substances, which research has shown to be the best at absorbing these radiations. Moreover, during times of danger, the vehicles will be coated with vaporous substances, further reducing the likelihood of detecting infrared waves.
Other materials that will be closely monitored to see if they could help include glass, wood, bricks, and stones. Modular thermal blankets provide the necessary thermal insulation, thereby minimizing the overall thermal signature (Hu et al., 2020). While this effort will not make the amphibious vehicles completely undetectable, it will make them blend into the surroundings, making them harder for enemies to detect. Figure 3 below shows the main components that will be used to ensure that this goal is met.
Low-Level Functions
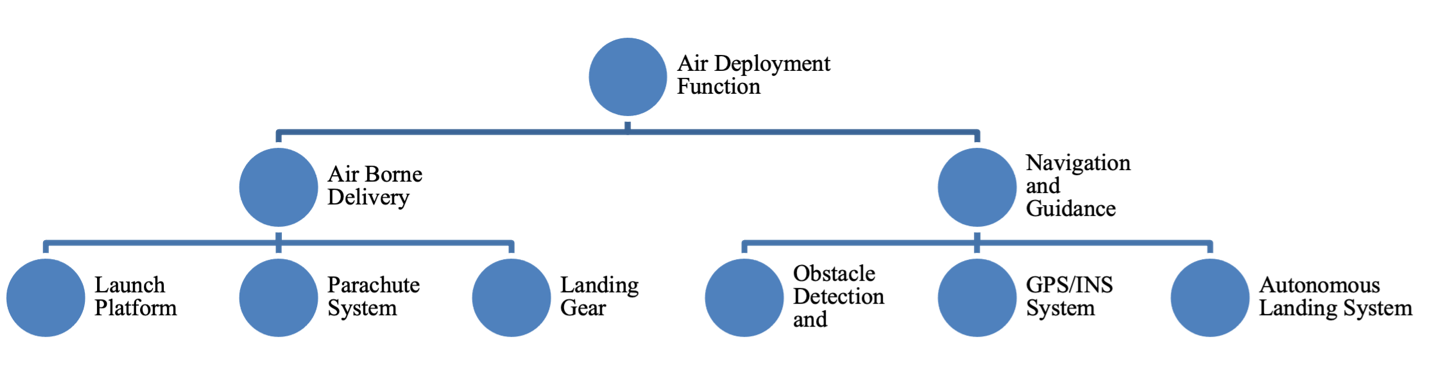
Airborne Delivery
The deployment function will include the airborne delivery, navigation, and guidance subfunctions. The airborne delivery function further breaks down into subfunctions, including the launch platform, parachute system, and landing gear. The C-17 Globemaster III will be used, as it can perform tactical airlift and airdrop missions and has been tested and proven by the U.S. military. C-17 boasts a maximum payload capacity of 77,519 kilograms and can thus carry the modified Bumerang IFV, which weighs 20,000 kilograms.
The cargo hold dimensions for a C-17 are 18.5 meters long, 3.7 meters wide, and 3.7 meters high. It can carry an amphibious vehicle measuring 7 meters long, 3 meters wide, and 2.5 meters high. The aircraft is also fitted with C-17 rear-loading capabilities, allowing it to load and unload oversized cargo, such as the modified Bumerang IFV. The system shall include parachutes to ensure a safe landing on land and in water. These features and modifications will enable the amphibious vehicle to be deployed by air.
Navigation and Guidance
The C-17 will be fitted with GPS, which will help determine the aircraft’s location, speed, and altitude during delivery of the amphibious vehicle. This is an easy, commonly used technology, so the engineering team will not take much time to implement it. More advanced Inertial Navigation Systems (INS), which identify the aircraft’s location using accelerometers and gyroscopes, will also be used (Borodacz et al., 2021). Integration of the two will ensure a more reliable means for identifying the aircraft’s location.
The standard ground proximity warning system (GPWS) will indicate the aircraft’s altitude above the ground. The crew will receive real-time information about the terrain they are navigating, thanks to terrain awareness and warning systems to be installed in this aircraft. Radar systems will help detect weather and enormous obstacles such as mountains. When deploying the vehicle, a semi-autonomous hybrid system will help optimize the deployment, preventing damage to the automobile.
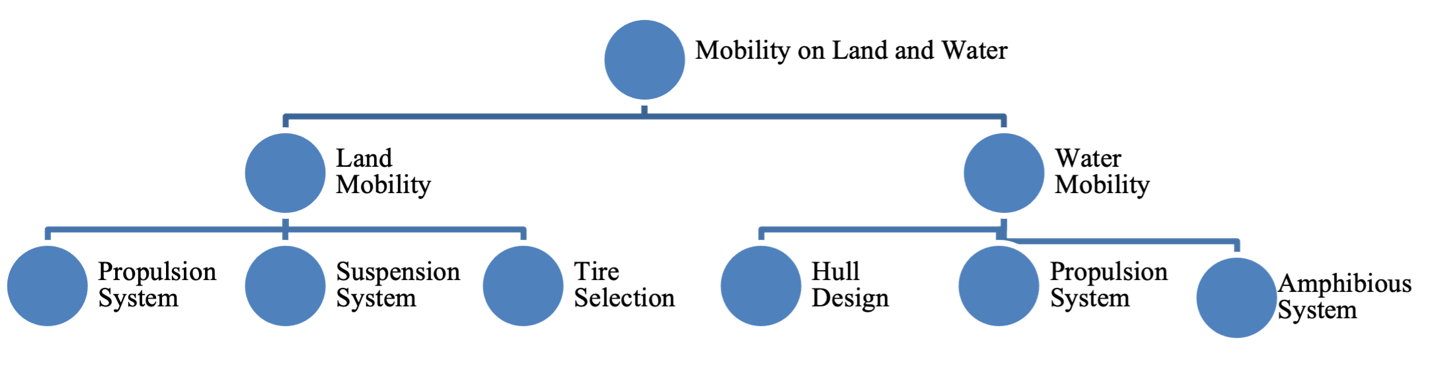
Land Mobility
The modified Bumerang-like vehicle will have an eight-wheel chassis, providing better traction and land mobility than the standard tracked amphibious vehicles. The wheeled design will enable the vehicles to hit a maximum speed of 120 km/hr while on land and be low-maintenance. Two proposals for automobiles are made, one of which is modular, meaning the vehicles can change depending on whether they are operating on land or at sea.
Additionally, two suspension modes, independent suspension and dependent suspension, will be further analyzed when choosing the final design. Ideal tires for a military vehicle need to be durable, have traction, and be adaptable (Nicolin and Nicolin, 2023). The cars will have tires made of natural and synthetic rubber, selected based on the mission’s nature. The general design of the amphibious vehicle is shown in illustration four below.

Water Mobility
For speed, maneuverability, and decent stability in water, the amphibious vehicles will use a planned hull design with integrated features. This aspect will ensure faster travel and adaptability in the seas at the expense of increased fuel utilization. Most sea operations will be in shallow waters, so water jets, known for their fuel efficiency, will be used. These jets are also capable of traversing various terrains and covering long distances.
The vehicles will be heavily insulated to keep the operators warm and dry. The speed in water is a high priority, and the car will be able to travel at 52 knots or more through water, even in waves. The vehicles, both on land and in water, will have three crew members: a driver, an armorer, and a controller.
Sensor, Network Connectivity, and Information Management
Radars, both land-based and marine, will be used to detect threats on land and at sea. The Sonor systems will provide additional protection by detecting submerged threats or people that may need to be rescued. Data fusion for improved accuracy shall be achieved through sensor integration, multi-sensor data fusion, and data quality assessment. Satellite communication systems will be used to ensure crew members remain well connected to the controllers. The interface for vehicle operators will be designed to be easy to use.
Stealth Function
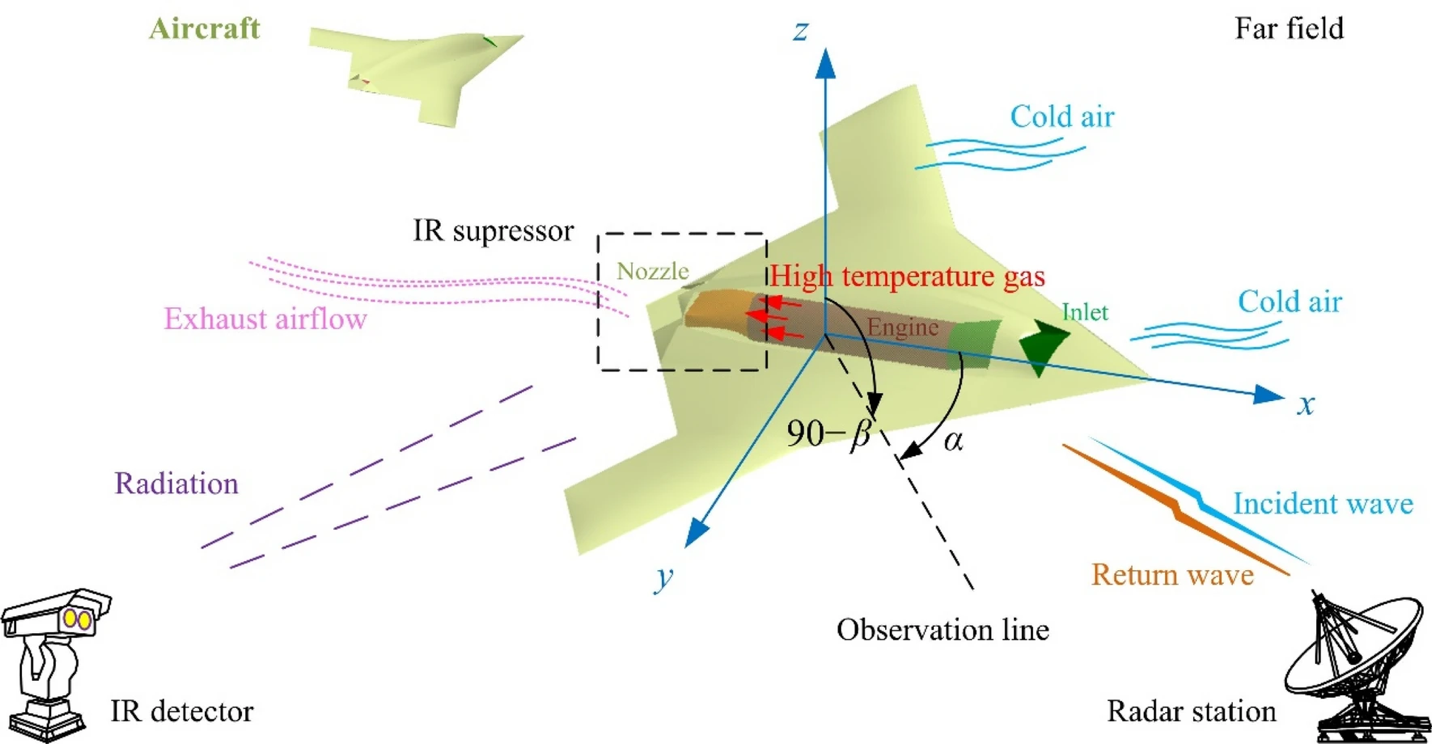
The stealth function will be designed to make the ADAV as invisible as possible. Radar-absorbing materials are used to prevent enemy waves from being reflected. The coating will also make the ADAV harder for enemy radar systems to detect. The acoustic signature design reduces radar cross-sections and infrared signal emissions by the aircraft used to transport the amphibious vehicles, as demonstrated in image five below (Zhou and Huang, 2021). This aspect can be attached to the underside of the vehicles to detect and identify enemy alerts (Ali et al., 2020).
The same physical design strategy shall be used for the land and sea versions of the vehicles to reduce the return of waves to the enemy’s radars. During manufacturing, silencing mechanisms will be prioritized to reduce noise. The surveillance function of the ADAV enhances situational awareness of vehicles and their ability to act as intelligence machines.
The heterogeneous wireless sensor network (HWSN), which supports military surveillance, disaster relief operations, and earthquake detection, will be mounted on vehicles (Singh et al., 2021). Sensor integrations will help collect data needed for surveillance using cameras and radars. This real-time data acquisition will ensure the system is highly responsive and that information is fed to all relevant stakeholders as quickly as possible. Telescopic systems and image enhancers will facilitate the long-range optics sub-function of the ADAV system.
System Synthesis
The ADAV system shall comprise various functional components, including mission operations, air deployment, controls, stealth, surveillance, mobility, payload handling, and communications. The comprehensive integration of the system’s eight main functions is recommended to ensure that functions do not overlap and avoid confusion about which team is responsible for different roles.
Mission operations entail how key system decisions shall be made and the planning for their implementation. The function will include a subfunction for mission planning, which will define the system’s roles and deployment routes for a successful deployment of ADAVs to the required locale. Mission execution subfunctions, on the other hand, will entail the actual deployment of the plans, such as deploying the vehicles, handling the payload, and conducting surveillance to ensure the enemy’s location is well known. The final sub-function of mission communication shall encompass establishing a broad network to facilitate the seamless transfer of information among relevant stakeholders. Thus, the mission operations functions will support effective planning, ensure execution of plans, such as deploying the ADAV, and facilitate communication and data transfer.
The ADAV system’s air deployment function will focus on specific processes, such as ensuring the vehicle is loaded into the plan, transported safely, and offloaded without damage. The automobiles will be deployed using parachutes and airdrop mechanisms because they are too heavy for a single method. The landing site will be identified within this function, and terrain-adaptive systems will be designed here. The control function will aim to ensure precise, reliable movement of the ADAV both in water and on land. This function will also ensure that the deployment aircraft’s controls meet the minimum expected standards.
Sub-functions under the control function will include manual controls that rely on human operation. The traditional joystick will be used since it can direct the vehicles (Liu, Xie, and Yang, 2020). Thus, the operators will always have control over the direction of the cars. Touchpad technology will be introduced to enhance user interactions and maximize the operator’s user experience. There will also be automated operations to help identify and address controls that cannot be achieved through human navigation.
Options and Evaluation
Design Option 1: Modulator Amphibious Configuration
This design option will be based on a modular approach, with ADAV configurations tailored to the type of mission being conducted. The system usually has interchangeable modules for various land terrains and the nature of the water bodies it operates in. For instance, when working in the lakes, the system configuration will differ from when on the sea. This design will provide the vehicles with flexibility to operate in various scenarios.
The modulator amphibious configuration design option shall facilitate mission versatility and enable maintenance and upgrade processes. This configuration is also desirable as it enables efficient resource utilization (Wang et al., 2022). However, some disadvantages must be considered, such as increased vehicle weight from the modulator components. It also requires the availability of highly skilled engineers to integrate and test it when its functionality is complex.
Design Option 2: Integrated Amphibious Platform
This design option will focus on fully integrating the system, combining land, sea, and air functions into a single unit. Therefore, the ADAV will have all the needed amphibious functionalities, eliminating the need for modulation. The advantages of using an integrated amphibious platform include reduced weight, as the system is integrated into a single unit. However, the platform designed using option 2 will have limitations, as it is less flexible. It will also be harder to create and thus will have potentially higher development costs.
Pugh Matrix for Options 1 and 2
The Pugh matrix is used to identify which option is better: the integrated amphibious platform or the modulator amphibious configuration. The decision-making tool weighs and evaluates options to make the best decision (Guler and Petrisor, 2021; Sreejith & Mathirajan, 2022). This matrix is designed based on various criteria, such as mission versatility, maintenance complexity, weight considerations, integration complexity, logistics efficiency, and aerodynamics, as shown in Table 1.
Based on the Pugh matrix, the benefits of option 1 far outweigh those of option 2. The modulator amphibious configuration is better as it approaches the missions with variations, thus capable of handling the unique and diverse Australian environmental landscape. The system design will be capable of achieving longevity, as its parts are easily upgradable and ensure the overall system’s longevity. Both systems are currently ready for implementation and are viable options.
Table 1: Pugh Matrix Comparing Modulator Amphibious Configuration with Integrated Amphibious Platform
Conclusion and Recommendation
The modulator amphibious configuration is selected over an integrated amphibious platform because it has higher scores in the Pugh matrix for greater versatility, can be easily integrated, and offers better resource utilization. The decision is made despite the knowledge that the system design has drawbacks in terms of weight and fit within the aircraft. Still, engineering designs will help address these problems. To synthesize the ADAV system, it will be essential to rely on functions to ensure that each department’s roles are well-defined.
Moving forward to the design stage of the system engineering V lifecycle, it will be imperative for the team to stick with the selected design option, as it is the most beneficial. Resources must be well allocated to every high-level function based on the number of sub-functions and their roles. Given the evolving nature of technology and the flexibility of the recommended amphibious modulator configuration, regularly upgrading the system will be essential to remain relevant in the constantly changing technological landscape. Moreover, as the design stage begins, stakeholders must be consulted on how certain operations should be handled.
Reference List
Abdulwasea, A.-O. et al. (2022) ‘Regenerative shock absorber using cylindrical cam and slot motion conversion’, Energy Harvesting and Systems, 9(2), pp. 179–191.
Ali, A. et al. (2020) ‘Military operations: Wireless Sensor Networks based applications to reinforce Future Battlefield Command System‘, 2020 IEEE 23rd International Multitopic Conference (INMIC), pp. 1–9.
Borodacz, K., Szczepański, C. and Popowski, S. (2021) ‘Review and selection of commercially available IMU for a short time Inertial Navigation‘, Aircraft Engineering and Aerospace Technology, 94(1), pp. 45–59.
de Boer, G. et al. (2022) ‘Observing the central Arctic atmosphere and surface with University of Colorado Uncrewed Aircraft Systems‘, Scientific Data, 9(1), pp. 1–31.
Embry-Riddle Aeronautical University (n.d.). Anatomy of Aircraft & Spacecraft.
Ferraro, D. et al. (2023) ‘Effect of wave motion on the scouring caused by a marine propeller jet: an experimental and numerical study’, Ocean Engineering, 290, pp. 1–16.
Fong, R.-Y. and Yuan, F.-G. (2021) ‘An in-situ real-time hidden damage inspection on C-17 Globemaster III composite aileron using LSP technique under thermal excitation‘, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2021, pp. 1–7.
Goldsworthy, S. (2019) The Tech behind amphibious vehicles. North Mankato, MN: Capstone Press.
Guler, K. and Petrisor, D.M. (2021) ‘A Pugh matrix-based product development model for increased small design team efficiency‘, Cogent Engineering, 8(1), pp. 1–13.
Hu, R. et al. (2020) ‘Emerging materials and strategies for personal thermal management‘, Advanced Energy Materials, 10(17), pp. 1–12.
Jasiński, D., Meredith, J. and Kirwan, K. (2021) ‘Sustainable development model for measuring and managing sustainability in the automotive sector‘, Sustainable Development, 29(6), pp. 1123–1137.
Konlechner, T.M. et al. (2020) ‘Mapping spatial variability in shoreline change hotspots from satellite data; a case study in Southeast Australia‘, Estuarine, Coastal and Shelf Science, 246, pp. 1–24.
Kundu, S., Roy, S. and Mukherjee, S. (2021) ‘An efficient obstacle-avoiding rectilinear Steiner tree construction method using PB-SAT‘, IETE Journal of Research, 69(6), pp. 3346–3356.
Labonté, G., (2020) ‘How aeroplanes fly at power-off and full-power on rectilinear trajectories. Advances in Aircraft and Spacecraft Science, 7(1), pp.53-78.
Lan, D. et al. (2021) ‘Application progress of conductive conjugated polymers in electromagnetic wave absorbing composites‘, Composites Communications, 26, pp. 1–17.
Liu, S., Xie, X. and Yang, L. (2020) ‘Analysis, modelling and implementation of a switching Bi-Directional Buck-boost converter based on electric vehicle hybrid energy storage for V2G system‘, IEEE Access, 8, pp. 65868–65879.
Manoharan, D. et al. (2021) ‘Design and development of autonomous amphibious unmanned aerial vehicle for in situ water quality assessment and water sampling‘, Journal of Unmanned Vehicle Systems, 9(3), pp. 182–204.
Nicolin, B.A. and Nicolin, I. (2023) ‘Tire selection for a military training aircraft‘, Macromolecular Symposia, 411(1), pp. 1–15.
Osborn, K. (2020) Get ready, Russia: Could a new vehicle clinch the U.S. Army’s arctic strategy? The National Interest.
Rafeeq, M. et al. (2021) ‘Locomotion strategies for amphibious robots-a review‘, IEEE Access, 9, pp. 26323–26342.
Sharma, P., Sarma, K.K. and Mastorakis, N.E. (2020) ‘Artificial intelligence aided electronic warfare systems-recent trends and evolving applications‘, IEEE Access, 8, pp.224761-224780.
Singh, S. et al. (2021) ‘A threshold-based energy efficient military surveillance system using heterogeneous wireless sensor networks‘, Soft Computing, 27(2), pp. 1163–1176.
Sreejith, S.S. and Mathirajan, M. (2022) ‘A modified Pugh matrix method for continuous performance evaluation of employees‘, South Asian Journal of Human Resources Management, 9(1), pp. 149–163.
Villa, D.K., Brandão, A.S. and Sarcinelli-Filho, M. (2019) ‘A survey on load transportation using multirotor UAVs,’ Journal of Intelligent & Robotic Systems, 98(2), pp. 267–296.
Zhou, Z.Y. and Huang, J. (2021) ‘Joint Improvements of radar/infrared stealth for exhaust system of unmanned aircraft based on sorting factor pareto solution‘, Scientific Reports, 11(1), pp. 1–24.