Introduction
Unmanned maritime systems (UMSs) have evolved over the years as navies from different countries endeavor to create new ways of completing tasks that would be dangerous to humans. For instance, the U.S. Navy is focused on enhancing the autonomous capabilities of unmanned maritime vehicles to minimize human involvement and the associated risks together with advancing its war-fighting capabilities. The unparalleled increase in computing power that is being witnessed contemporarily will play an important role in the future of ensuring autonomy in unmanned maritime systems. This blog post discusses the article “Advancing Autonomous Systems” by Martin et al. (2019). Specifically, the focus of this blog post is on the future fleet architecture of unmanned maritime vehicles (UMVs) (both unmanned surface vehicles [USVs] and unmanned undersea vehicles [UUVs]) and their autonomous capabilities.
The Future of UMVs Fleet Architecture and its Autonomy
According to Martin et al. (2019), in 2017, the National Defense Authorization Act directed the Department of Defense, specifically the Navy, the come up with various fleet architectures as a way of identifying key force structure and capabilities for Navy UMVs by 2030 and beyond. The architecture for future UMVs will be driven by the need to meet different operational needs. First, UMVs should be in a position to function in limited-connectivity environments. The current communication platform is a complicated architecture that relies on heavily interconnected systems. However, according to Martin et al. (2019), there is a need for “organic over-the-horizon sensing that can pass targeting information back to the host platform via a direct path” (p. 41). This aspect will increase the UMVs capabilities and autonomy to function in isolation and achieve set targets, thus improving its war-fighting capacity.
In addition, improving the autonomy of UMVs would ensure their safety and better their operational abilities. For instance, in 2018, the US Navy invested heavily in UUVs to improve their capacity to detect and disable mines autonomously, which improves their safety considerably. Moreover, the Navy is working on solutions to allow UMVs to engage enemy vessels using onboard weapons (Naval Technology, 2018). A prototype of the architecture for such a system is shown in figure 1 below. I agree with the observation by Martin et al. (2019) that future architecture for UMVs should be concerned with developing a system that allows such vehicles to function in environments with limited connectivity. This development improves the autonomy of such vehicles together with facilitating the ability to accomplish their missions as singular entities without having to rely on other platforms.
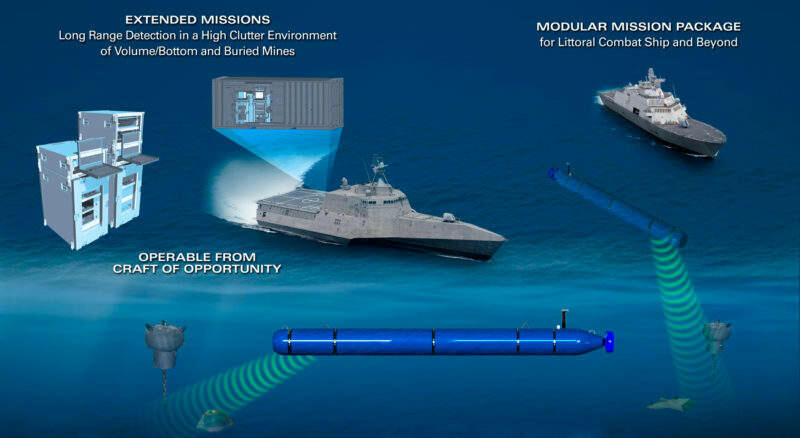
Future UMVs will have the capacity to sustain distributed lethality whereby different units in diverse locations would be in a position to provide and collaborate coordinated fires across an expansive area. Consequently, such vehicles will be required to organically overcome local anti-access threats, including mines. Additionally, Martin et al. (2019) argue that future UMVs will have the ability to collect intelligence and data in restricted areas. Currently, the available space-based surveillance systems have limited capacities to access data from some areas. Hence, future UMVs should have systems to overcome this challenge. Similarly, such vehicles should be capable of denying the enemy an opportunity for easy targeting (Hayes, 2018). Figure 2 below gives a visual presentation of what is expected of future UMVs, and more information could be obtained from this link nautilus.org. I agree with Martin et al.’s argument that future UMVs should be versatile and highly adaptable to changing environments as a way of attaining the set objectives, such as reducing harm to humans and navigating rugged terrains.

Martin et al. (2019) conclude that moving forward, the autonomy of UMVs will play a critical role in ensuring continued operations, especially in environments with limited communication. The projected future for UMVs is in line with the current technological progress. Insaurralde (2015) agrees with this argument by noting that using artificial intelligence (AI), multiple small platforms could be used to execute single tasks in a kill chain within compressed timelines for optimal performance. Therefore, the future of UMVs is bright, and the need to achieve full autonomy will be possible through the incorporation of AI.
Conclusion
The technological revolution of the 21st century has facilitated the development of UMVs with versatile capabilities, especially in environments with limited communication. The future of UMVs will focus on achieving more autonomy for such vehicles to ensure that they overcome challenges facing the current space-based surveillance systems. One of the major benefits of autonomous UMVs is the ability to overcome challenges associated with interconnected platforms. In addition, such systems have improved safety measures, such as the ability to overcome anti-access threats. The incorporation of AI will play an important role in the realization of autonomous UMSs in the future. However, the Navy should be aware of the risks associated with fully autonomous UMVs, including vulnerabilities to countermeasures by the enemy.
References
Hayes, P. (2018). Off the beach: Underwater warfare in the 21st century.
Insaurralde, C. (2015). Intelligent autonomy for unmanned marine vehicles: Robotic control architecture based on service-oriented agents (studies in systems, decision and control). New York, NY: Springer.
Martin, B., et al. (2019). Advancing autonomous systems: An analysis of current and future technology for unmanned maritime vehicles. Santa Monica, CA: RAND Corporation.
Naval Technology. (2018). Splash in the ocean: The US Navy’s UUV investment.